
| CV |
Github |
|
I'm working as a research assistant for Prof. Ching-Chun Huang in National Yang Ming Chiao Tung University (NYCU), and am fortunate to be co-advised by Prof. Wei-Chen Chiu (NYCU) and Dr. Pin-Yu Chen (MIT-IBM Watson AI Lab). Before this, I obtained Bachelors's Degree and Master's Degree in Electrical Engineering at National Chung Cheng University (CCU). I’m broadly interested in diverse machine learning topics, including learning from imperfect data, decisionmaking, multi-media applications, and multi-modal matching problems. My longterm goal is to develop machine learning systems that can (1) understand the environment and reasoning from muti-source data, (2) comunicate with human, and (3) operate reliably and unbiasedly even under challenging conditions. Along with the research directions, I am interested in and have conducted researches on zero-shot learning, meta-learning, and reinforcement learning applications for smart buildings. |
NYCU |

CCU |

Awoo Inc. |
CCU |
|---|
|
|
abstract |
link |
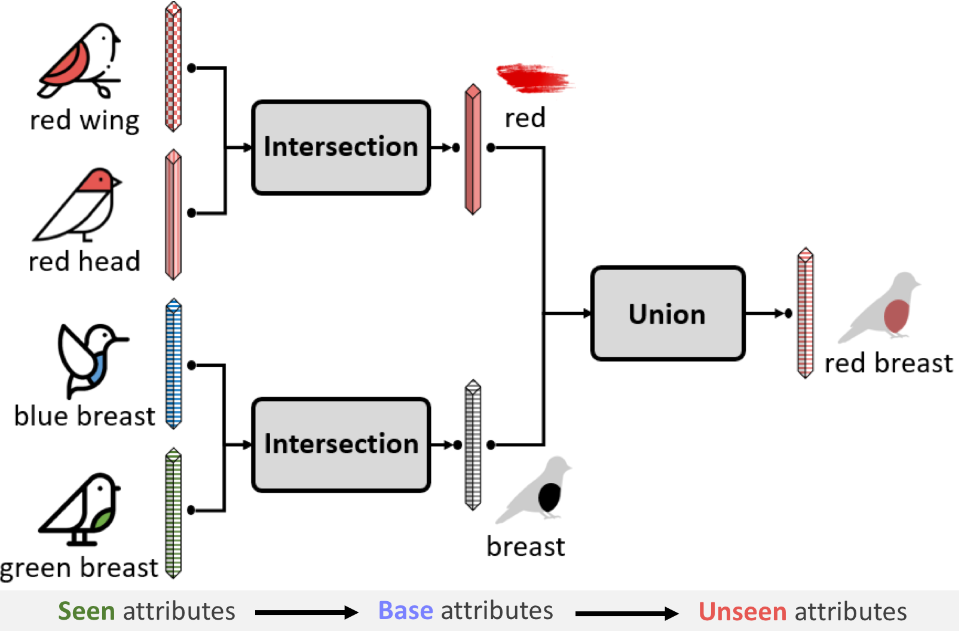
Most of the existing algorithms for zero-shot classification problems typically rely on the attribute-based semantic relations among categories to realize the classification of novel categories without observing any of their instances. However, training the zero-shot classification models still requires attribute labeling for each class (or even instance) in the training dataset, which is also expensive. To this end, in this paper, we bring up a new problem scenario: “Are we able to derive zero-shot learning for novel attribute detectors/classifiers and use them to automatically annotate the dataset for labeling efficiency?”. Basically, given only a small set of detectors that are learned to recognize some manually annotated attributes (i.e., the seen attributes), we aim to synthesize the detectors of novel attributes in a zero-shot learning manner. Our proposed method, Zero-Shot Learning forAttributes (ZSLA), which is the first of its kind to the best of our knowledge, tackles this new research problem by applying the set operations to first decompose the seen attributes into their basic attributes and then recombine these basic attributes into the novel ones. Extensive experiments are conducted to verify the capacity of our synthesized detectors for accurately capturing the semantics of the novel attributes and show their superior performance in terms of detection and localization compared to other baseline approaches. Moreover, with using only 32 seen attributes on the Caltech-UCSD Birds-200-2011 dataset, our proposed method is able to synthesize other 207 novel attributes, while various generalized zero-shot classification algorithms trained upon the dataset re-annotated by our synthesized attribute detectors are able to provide comparable performance with those trained with the manual ground-truth annotations. |
|
|
abstract |
link |
project |
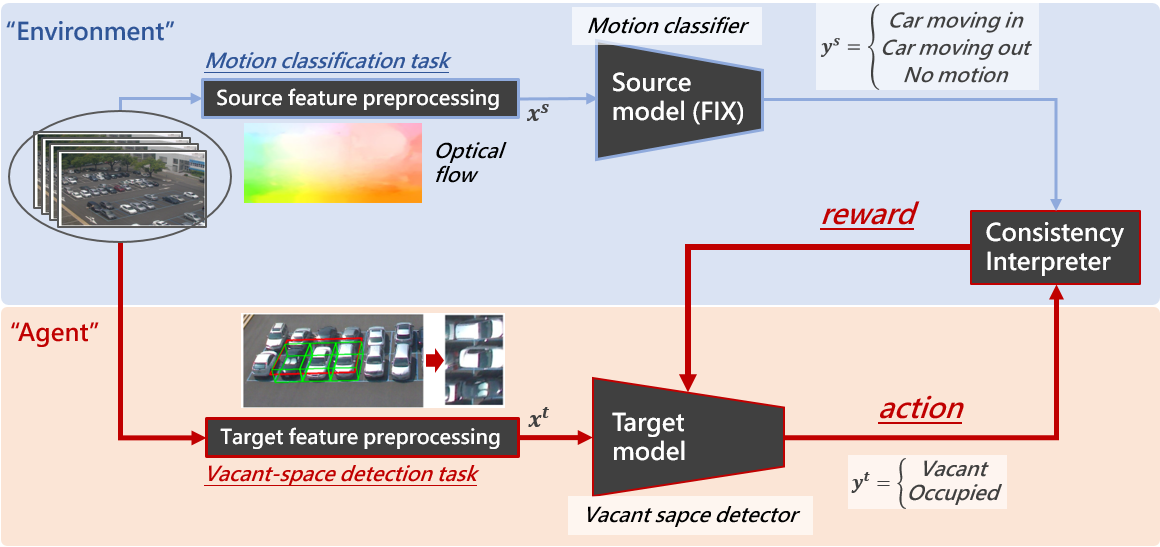
In this paper, we proposed a novel task-consistency learning method that allows training a vacant space detection network (target task) based on the logic consistency with the semantic outcomes from a flow-based motion behavior classifier (source task) in a parking lot. By well designing the reward mechanism upon semantic consistency, we show the possibility to train the target network in a reinforcement learning setting. Compared with conventional supervised detection methods, this work's main contribution is to learn a vacant space detector via semantic consistency rather than supervised labels. The dynamic learning property may make the proposed detector been deployed and updated in different lots easily without heavy human loads. The experiments show that based on the task consistency rewards from the motion behavior classifier, the vacant space detector can be trained successfully. |
|
|
abstract |
link |
project |
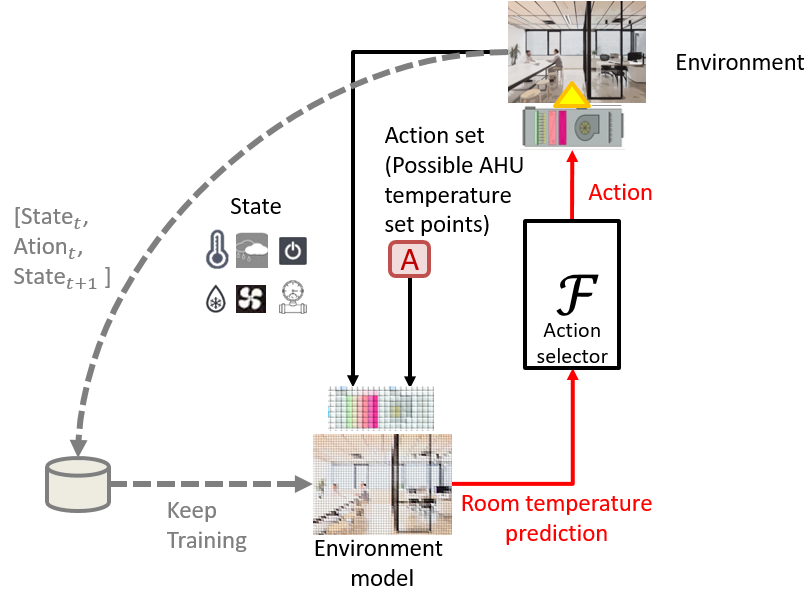
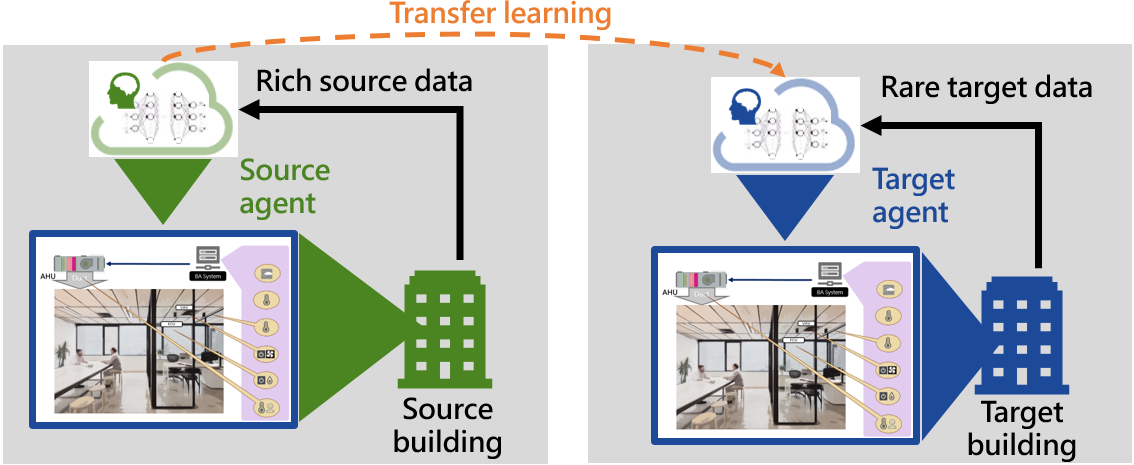
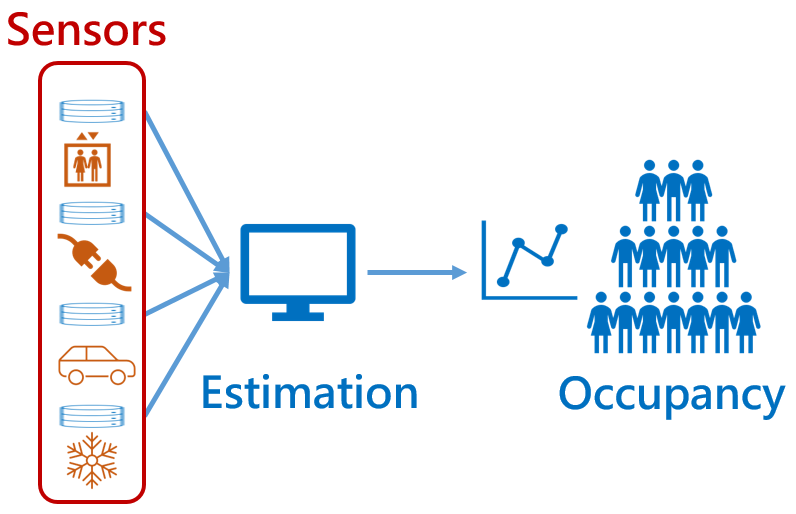
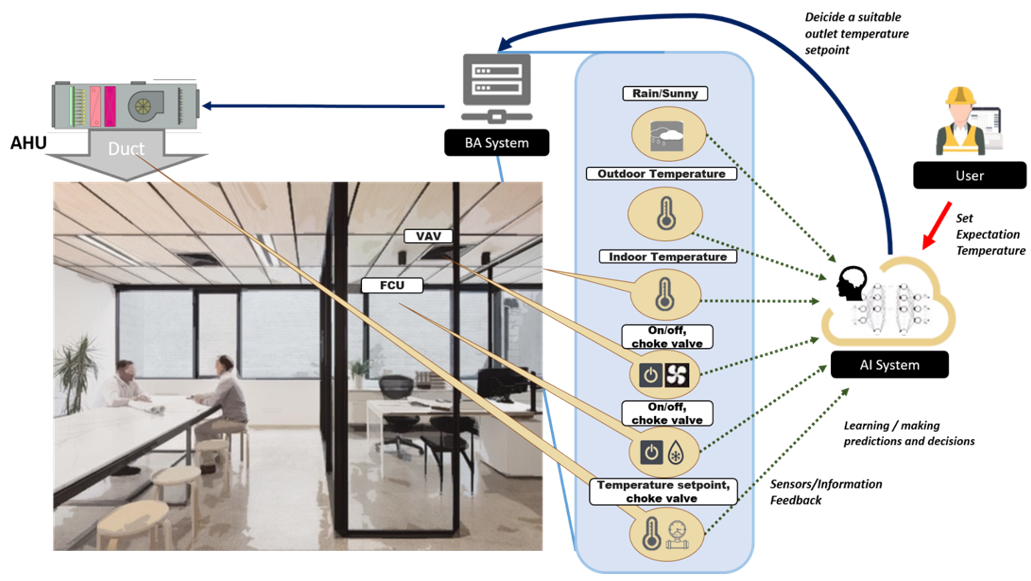
In this paper, we introduce an online-learning method to model the property of an office building. Unlike conventional control methods where the building property is modeled via a simulator or through offline learning, our building model is adaptively updated according to the dynamic response of a real environment. Upon the building model for environment prediction, the proposed action agent can control the heating, ventilation, and air conditioning (HVAC) system in a smarter way by scheduling the temperature reference point. To online learn the model and improve the agent, two practical and seldom discussed issues are addressed. The first challenge is data bias where the collected initial training dataset can only partially reveal the statistical mapping between the control input and the environment response. Hence, the trained model may lack generalization. To overcome the data bias issue, a data augmentation method is proposed to embed physical logic in order to train a proper initial model. Next, an online learning process is introduced to update the model generality during the system operation phase. The second practical issue is the constraints on agent exploration for discovering unknown data samples. During the business hours, to comfort employees, a control agent is not allowed to explore the possible controlling space randomly. To balance data collection and control stability, we introduce a hybrid control strategy that considers both the human control rule and the agent action. A confidence score of the agent model is also automatically estimated to determine a suitable control strategy finally. Our experiments have realized in an office building. The results outperform conventional methods and show its superior in terms of control stability. |
|
... Read more
[Goal]
|

|
... Read more
[Goal]
|
|
... Read more
Goal:
|
|
... Read more
Goal:
|
|
|
|
|
Template: this
|